Der erste Teil der Quadcopter-Serie kann hier nachgelesen werden: Quadcopter Teil 1
Der zweite Teil der Quadcopter-Serie kann hier nachgelesen werden: Quadcopter Teil 2
Es hat mich schon immer gereizt, so ein Gerät selbst zusammen zu schrauben. Dieses Vorhaben habe ich nun endlich wahr gemacht. Im dritten Teil der Serie dreht sich alles um die Stromverteilung und die Montage des Flight-Controllers. Um weiter basteln zu können, musste ich mich für ein Quadcopter-Layout entscheiden. Es gibt die sogenannte Plus- und die X-Konfiguration. Bei der Plus-Konfiguration ist einer der 4 Motoren in Flugrichtung vorne. Bei der X-Konfiguration liegt die Vorderseite des Quadcopters zwischen 2 Motoren, sprich als Quadrat gedacht, befinden sich die 4 Motoren in den Ecken.
Ich habe mich für die X-Konfiguration entschieden, weil sie mir irgendwie cooler als die Plus-Konfiguration erschienen ist ;-)
 |
 |
|
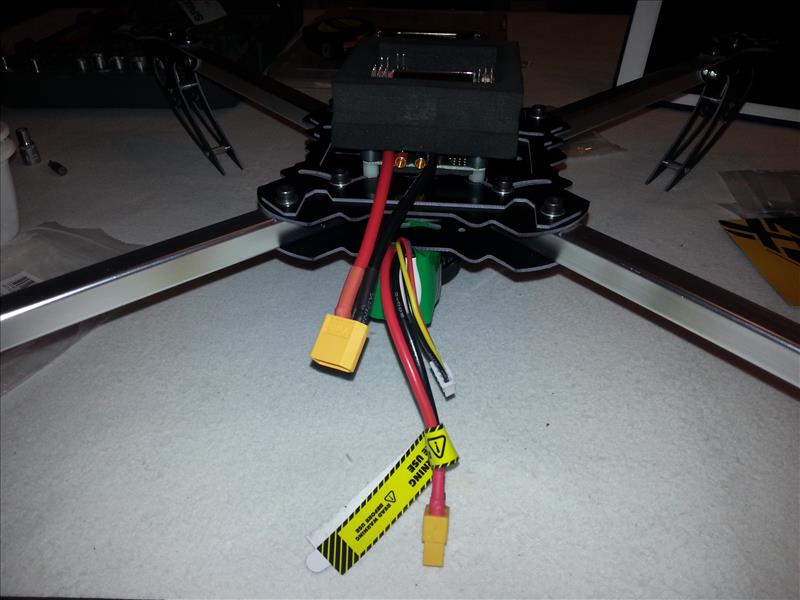
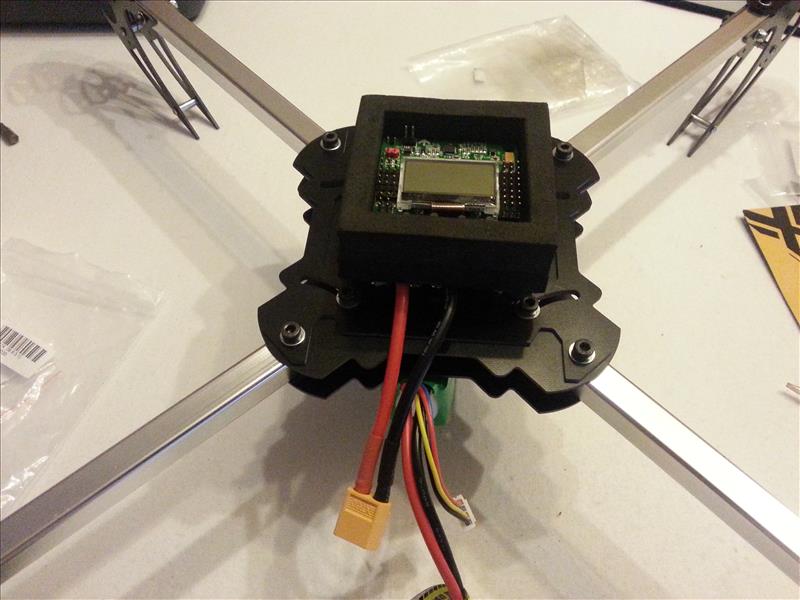
Auf den Fertigen Rahmen habe ich das Power-Distribution-Board, die Schutzhülle für den Flight-Controller und den Flight-Controller mit Nylon-Schrauben und Distanzhaltern aufgeschraubt (siehe Bilder). Am linken Bild sieht man zwischen Rahmen und dem grauen Schaumstoff die Strom-Anschlüsse für die Speed-Controller herausschauen (rot bzw. schwarz ummantelte Buchsen).
Ich hielt es für eine gute Idee, den Flight-Controller gut zu schützen, falls es einmal zu der einen oder anderen holprigen Landung kommen sollte (da ich auf dem Gebiet absoluter Anfänger bin, ist das nicht so unwahrscheinlich).
|
Als Schutzhülle habe ich nichts anderes verwendet, als die Schaumstoff-Verpackung in der Flight Controller geliefert wurde. Die Löcher in den Ecken der Verpackung waren schnell gemacht, das Zusammenschrauben wurde zu einem kleinen Geduldspiel weil die Nylonschrauben gerade einmal lang genug waren, ein paar Millimeter mehr hätten hier nicht geschadet. Zum Glück ist der Schaumstoff weich und somit hat sich alles ein wenig zusammen pressen lassen.
|
 |
 |
|
Als nächstes habe ich die Motoren auf die Halterungen aufgeschraubt. Bis ich verstanden habe wie die Motoren funktionieren und montiert gehören, hat es auch einige Zeit gedauert. Wie gesagt ist das Neuland für mich, die einfachsten Dinge erscheinen hier sehr kompliziert... ;-)
Nachdem alle 4 Motoren montiert waren, habe ich mich den Speed-Controllern zugewendet. Zuvor aber noch ein kurzer Ausflug in Sachen Flight-Controller.
|
Später habe ich in diversen Foren habe ich darüber gelesen, dass man den KK2.1.5 mit einer anderen Firmware flashen kann, die wesentlich besser als jene, die vom Hobbyking ausgeliefert wird. Die "Steveis" Firmware soll das non-plus-ultra sein. Da es thematisch eigentlich hier her gehört, ziehe ich diese später gemachten Erfahrungen vor. Der Blog von Steveis verrät einem alles, was man wissen muss (zu finden hier: http://www.rcgroups.com/forums/member.php?u=367321). Ich fasse hier kurz zusammen was zum flashen benötigt wird. Als erstes muss man sich ein sogenanntes USBasp besorgen (siehe oben, USBasp, Adapter von 10- auf 6-polig sowie das Kabel, erhältlich hier: http://www.fischl.de/usbasp/, dort findet man auch den Treiber für selbiges).
|
 |
 |
|
USBasp an PC anstecken, Treiber installieren (Windows meckert weil der Treiber nicht signiert ist), anschließend den Flight-Controller mittels Kabel und Adapter ans USBasp anstecken.
Falls Windows 8 verwendet wird, muss man speziell tricksen um den nicht signierten Treiber installieren zu können, auch das ist auf der Website von Thomas Fischl (http://www.fischl.de/usbasp/) beschrieben.
Das Ganze funktioniert übrigens auch unter Linux und MacOS.
|
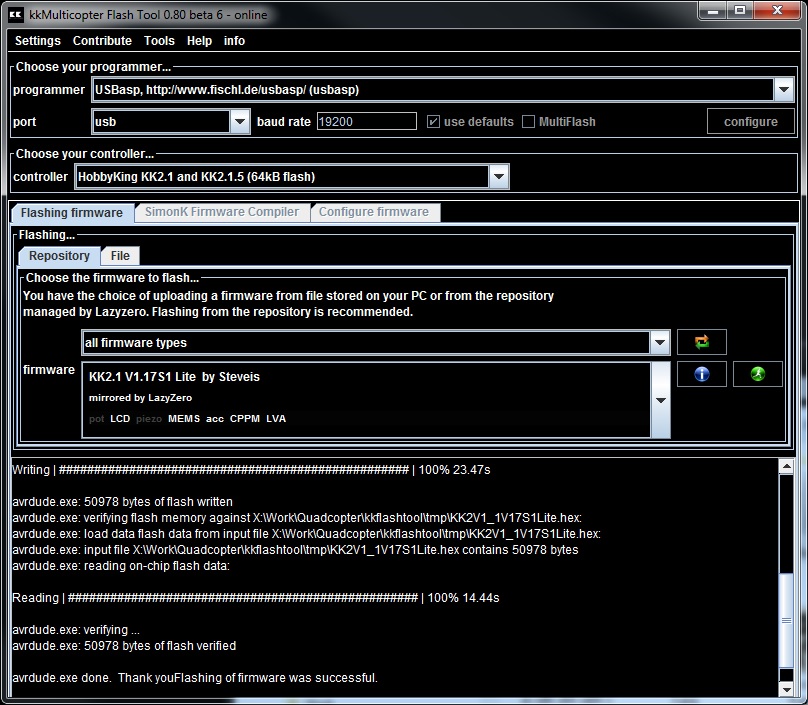
Als nächstes braucht man eine Software mit der die Firmware geflasht werden kann. Ich habe das kkflashtool (http://lazyzero.de/kkflashtool) verwendet. Dieses hat den Vorteil dass die verschiedenen Firmware-Versionen als Repository inkludiert sind, man muss nur mehr aus der Dropdown List auswählen welche Firmware man installieren will.
|
 |
 |
|
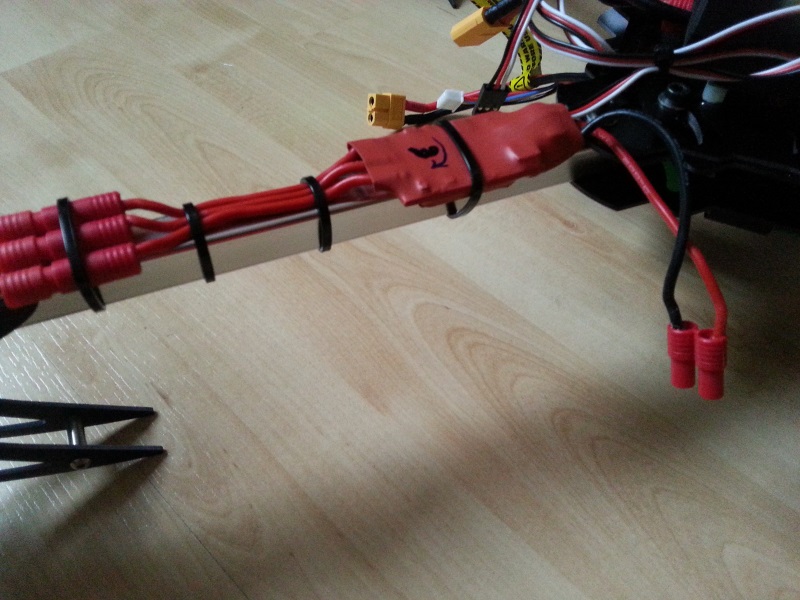
Als nächstes war es notwendig, die Speed-Controller (ESC) mit Steckern zu versehen, da diese ohne selbige ausgeliefert wurden. Hier musste ich also zum Lötkolben greifen. Für die Stromversorgung musste ein 2-poliger Stecker, für die Verbindung zum Motor ein 3-poliger Stecker (Buchsen) angelötet werden. Danach habe ich den ESC mittels Kabelbinder auf dem Arm angebracht und den 2-poligen Stecker mit dem Power-Distribution-Board verbunden.
|
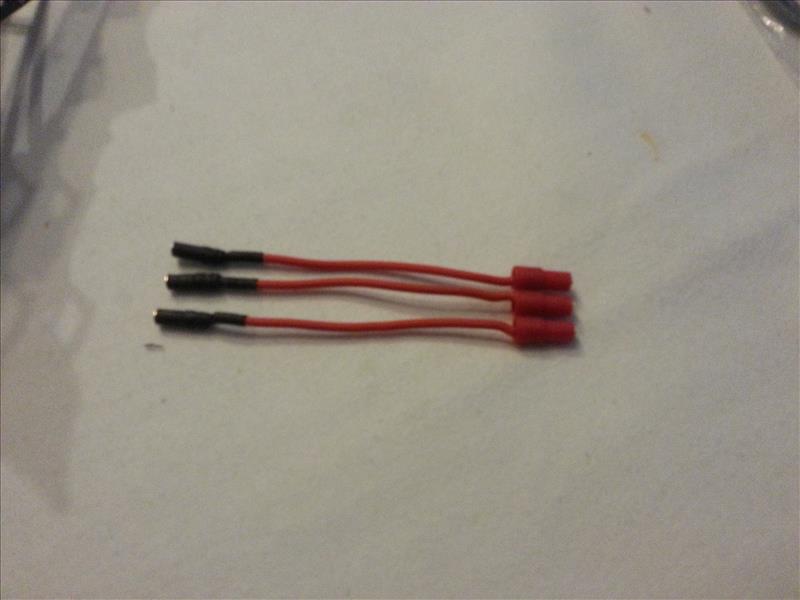
Wie sich herausstellte, ist sich das Verbinden der Motoren mit den ESCs um wenige Zentimeter nicht ausgegangen. Ich musste daher 3-polige Verlängerungskabel anfertigen. Hierbei habe ich bemerkt, dass durch das Lange Anheizen der Stecker (damit sich das Lötzinn gut im Inneren des Steckers verteilt), die Kabelisolierung teilweise in Mitleidenschaft gezogen wurde. daher bin ich dazu übergegangen nicht mehr die vorgefertigten Kunststoff-Hülsen zu verwenden, sondern mit Schrumpfschläuchen zu arbeiten, damit hier eine 100%ige Isolierung gegeben ist.
|
 |
|
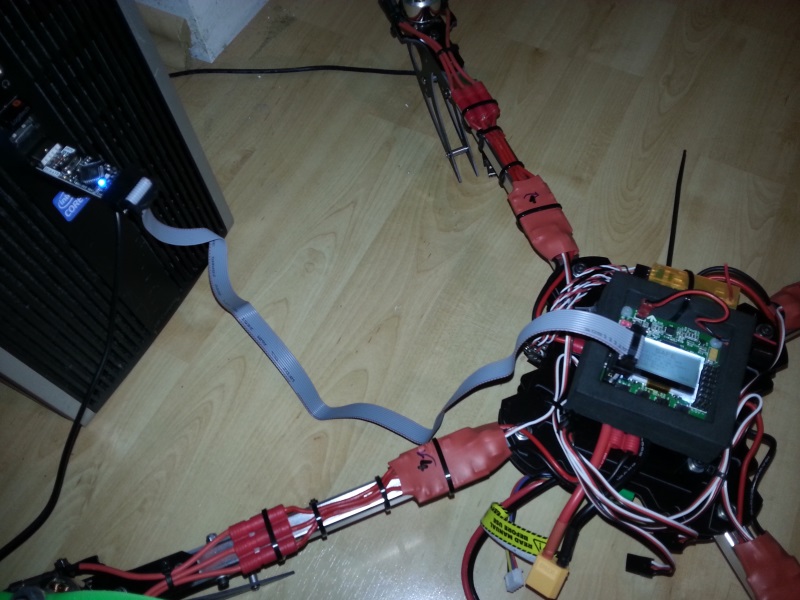
Mittels der Verlängerungskabel habe ich nun die Motoren an die ESCs angeschlossen. Sämtliche Kabel wurden mit Kabelbinder am Rahmen befestigt, damit nichts absteht und sich irgendwo verfangen kann.
|
Im nächsten Teil der Serie dreht beschäftige ich mich mit Fernbedienung und Empfänger und dem Kalibrieren der Speed Controller.
Der erste Teil der Quadcopter-Serie kann hier nachgelesen werden: Quadcopter Teil 1
Der zweite Teil der Quadcopter-Serie kann hier nachgelesen werden: Quadcopter Teil 2
(RaiZl)